Overview

Abstract
We propose Self-Augmented Residual 3D Gaussian Splatting, a novel framework for stabilizing uncertainty quantification and enhancing uncertainty-aware supervision in Next-Best-View selection for active scene reconstruction. To efficiently estimate scene coverage, SA-ResGS generates geometry-consistent Self-Augmented point clouds (SA-Points) via triangulation between observed training views and rasterized extrapolated views. To address the lack of learning signals in underrepresented regions within sparse, wide-baseline settings, we introduce the first skip-connection-inspired residual learning strategy tailored for 3DGS. This mechanism amplifies gradient flow to weakly contributing, high-uncertainty Gaussians. Our contributions are threefold: (1) a physically grounded, diversified view selection strategy; (2) an uncertainty-aware residual supervision scheme that improves gradient flow and learning stability; and (3) implicitly debiased uncertainty quantification resulting from constrained view selection and residual supervision. Experiments on NeRF Synthetic, Mip-NeRF 360, and challenging extended benchmark from Deep Blending and Tanks and Temples demonstrate that SA-ResGS consistently outperforms state-of-the-art competing methods in both reconstruction quality and view selection robustness.
Self-Augmented Points (SA-Points)
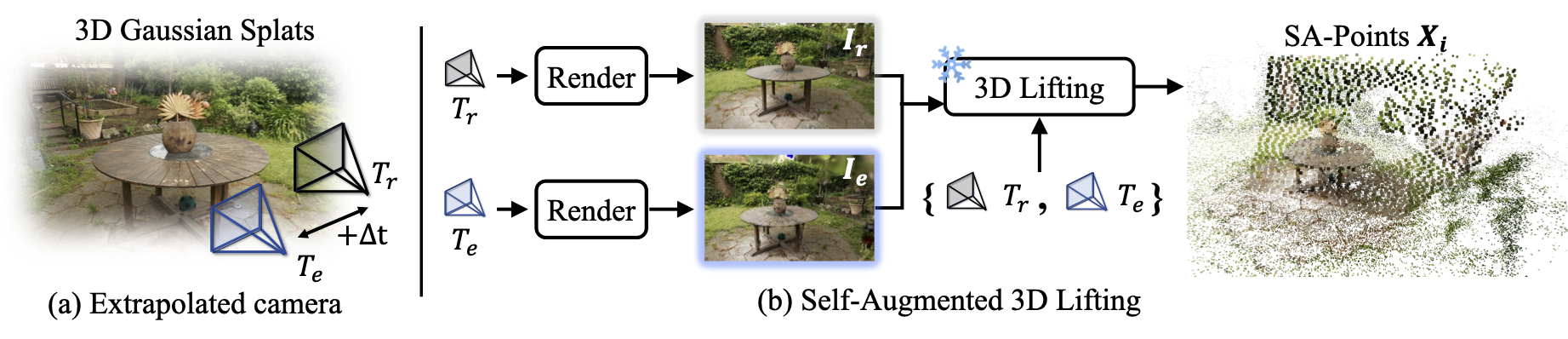 SA-Points generation. (a) A virtual camera pose is extrapolated from a reference training view by adding a translation Δt.
(b) The reference image and the extrapolated render are jointly processed by a 3D lifting module (MASt3R by default)
to triangulate SA-Points. Reprojection-error-based filtering retains scale-consistent, surface-aware geometry from
a single training image — without multi-view input or monocular depth.
SA-Points generation. (a) A virtual camera pose is extrapolated from a reference training view by adding a translation Δt.
(b) The reference image and the extrapolated render are jointly processed by a 3D lifting module (MASt3R by default)
to triangulate SA-Points. Reprojection-error-based filtering retains scale-consistent, surface-aware geometry from
a single training image — without multi-view input or monocular depth.
Coverage Estimation
 Coverage-based candidate selection. (a) SA-Points from training views define observed voxels.
(b) Each candidate view yields a binary hash-encoded occupancy feature via frustum-based visibility.
(c) The normalized Hamming distance between hash features quantifies coverage dissimilarity,
enabling efficient selection of geometrically complementary views without rendered images or uncertainty scores.
Uncertainty scoring is then applied only within the top-ranked, pre-filtered candidate subset (coarse-to-fine).
Coverage-based candidate selection. (a) SA-Points from training views define observed voxels.
(b) Each candidate view yields a binary hash-encoded occupancy feature via frustum-based visibility.
(c) The normalized Hamming distance between hash features quantifies coverage dissimilarity,
enabling efficient selection of geometrically complementary views without rendered images or uncertainty scores.
Uncertainty scoring is then applied only within the top-ranked, pre-filtered candidate subset (coarse-to-fine).
Uncertainty-Guided Residual Learning
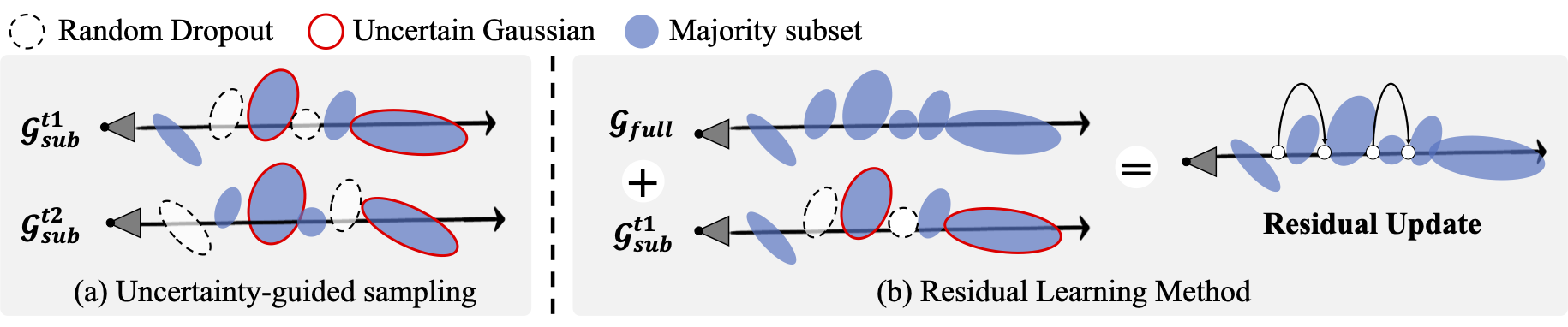 Residual supervision in 3DGS. (a) At each iteration, a guided subset combines a random sample (α%)
of Gaussians with the top-β most uncertain Gaussians (ranked by low opacity and large scale).
(b) Supervising both the full render and the uncertainty-intensified subset render mimics ResNet-style skip connections,
amplifying gradients toward under-optimized Gaussians without modifying the rasterizer.
Residual supervision in 3DGS. (a) At each iteration, a guided subset combines a random sample (α%)
of Gaussians with the top-β most uncertain Gaussians (ranked by low opacity and large scale).
(b) Supervising both the full render and the uncertainty-intensified subset render mimics ResNet-style skip connections,
amplifying gradients toward under-optimized Gaussians without modifying the rasterizer.
Visual Comparisons with 20 Training Views












Selected Camera View Distribution
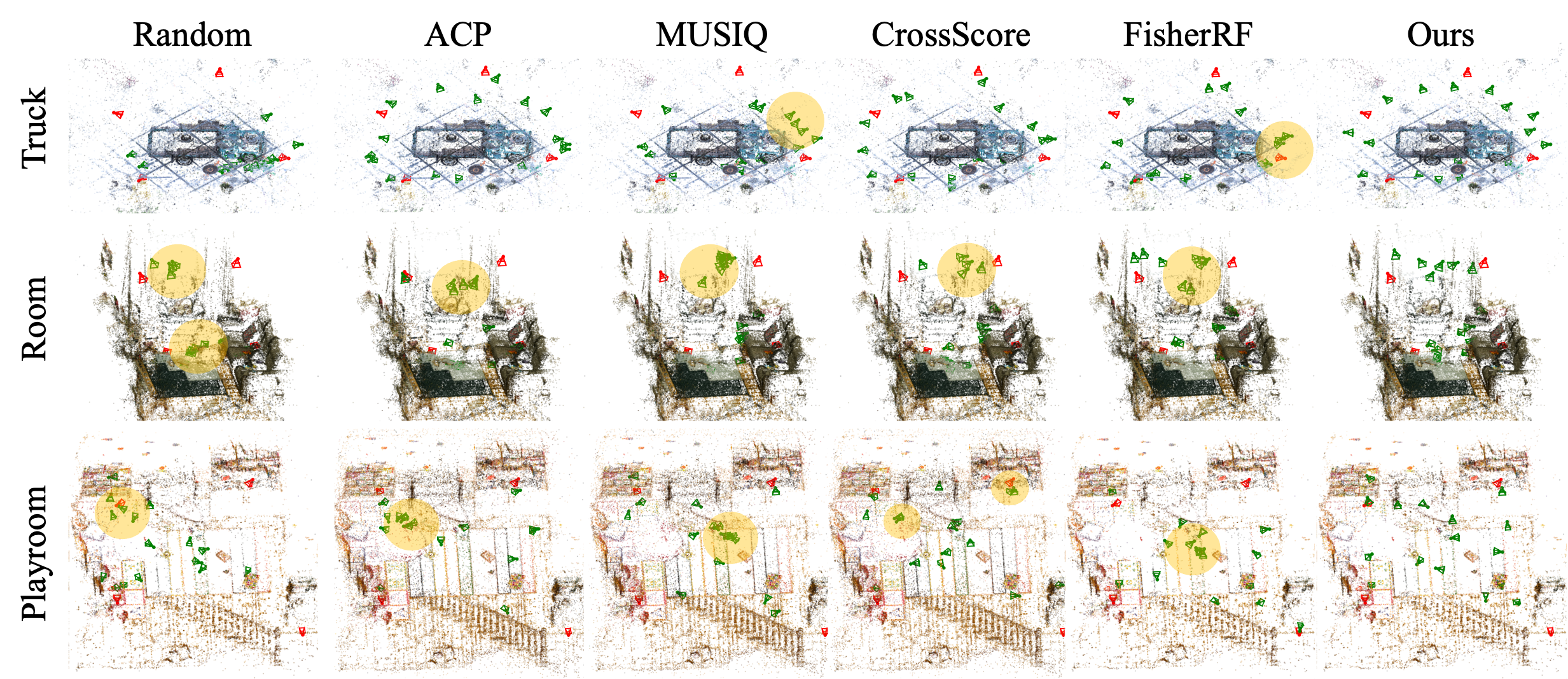
Camera poses selected by each method. Competing methods (especially FisherRF) cluster around high-response regions due to coupling with 3DGS training dynamics, while SA-ResGS produces a more uniformly distributed, geometrically diverse set of viewpoints.
Supplementary Video
BibTeX
@inproceedings{saresgs26,
title={SA-ResGS: Self-Augmented Residual 3D Gaussian Splatting for Next Best View Selection},
author={Jun-Seong, Kim and Oh, Tae-Hyun and Pérez-Pellitero, Eduardo and Jang, Youngkyoon},
booktitle=ECCV,
year={2026}
}
Acknowledgement
We thank the members of AMILab and Huawei Noah's Ark Lab for helpful discussions and proofreading.
This work was partially supported by Institute of Information & Communications Technology Planning & Evaluation (IITP) grant (No. RS-2026-25518317, Development of AI memory mechanism that reflects human cognitive principles), the National Research Foundation of Korea (NRF) grant (No. RS-2024-00451947; No. RS-2024-00453301), and the InnoCORE program of the Ministry of Science and ICT(26-InnoCORE-01) funded by the Korea government (MSIT).
This website is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. This means you are free to borrow the source code of this website, we just ask that you link back to the original page in the footer.